
Themenschwerpunkte
Die fortschreitende Entwicklung automatisierter Fahrzeuge erfordert neue Ansätze für die Validierung und Zulassung. Herkömmliche, auf Realfahrten basierende Absicherungsmethoden stoßen angesichts der kurzen Entwicklungszyklen und der Variantenvielfalt dieser Fahrzeuge an ihre Grenzen. Die damit verbundenen hohen Kosten, Sicherheitsrisiken und Emissionen bei Realfahrten sowie das seltene Auftreten kritischer – und daher interessanter – Szenarien sind nur einige der aktuellen Herausforderungen. In der Forschungsgruppe „Automated & Connected Mobility” (ACM) werden sowohl die Frage nach den zu testenden Szenarien als auch nach der adäquaten Validierungsumgebung erforscht. Die folgenden Themenschwerpunkte werden in aktuellen Forschungs- und Industrieprojekten behandelt:
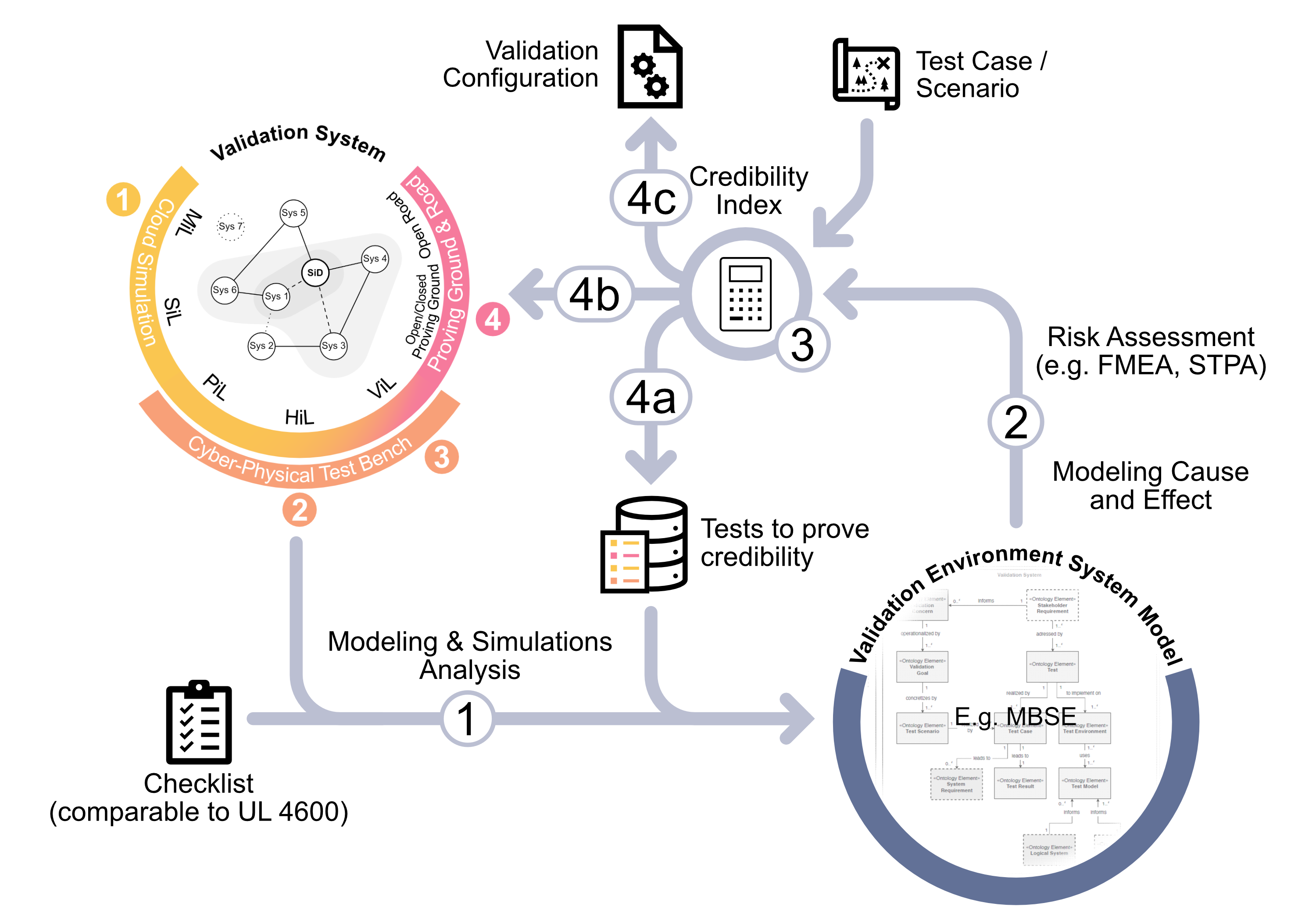 |
Credibility virtueller ValidierungsumgebungenDer Einsatz virtueller Validierungs- und Verifikationsmethoden reduziert Aufwände und Kosten in der Entwicklung von cyber-physischen Systemen und Produkten. Die gesteigerte Abstraktion erfordert jedoch einen Glaubwürdigkeits- bzw. Credibilitynachweis bei der Verwendung der Ergebnisse in der Homologation, Zulassung oder bei wichtigen Entscheidungen in der Entwicklung. In mehreren Forschungs- und Industrieprojekten beschäftigen wir uns mit der Entwicklung einer Methode für den Credibilitynachweis von virtuellen Methoden. |
|
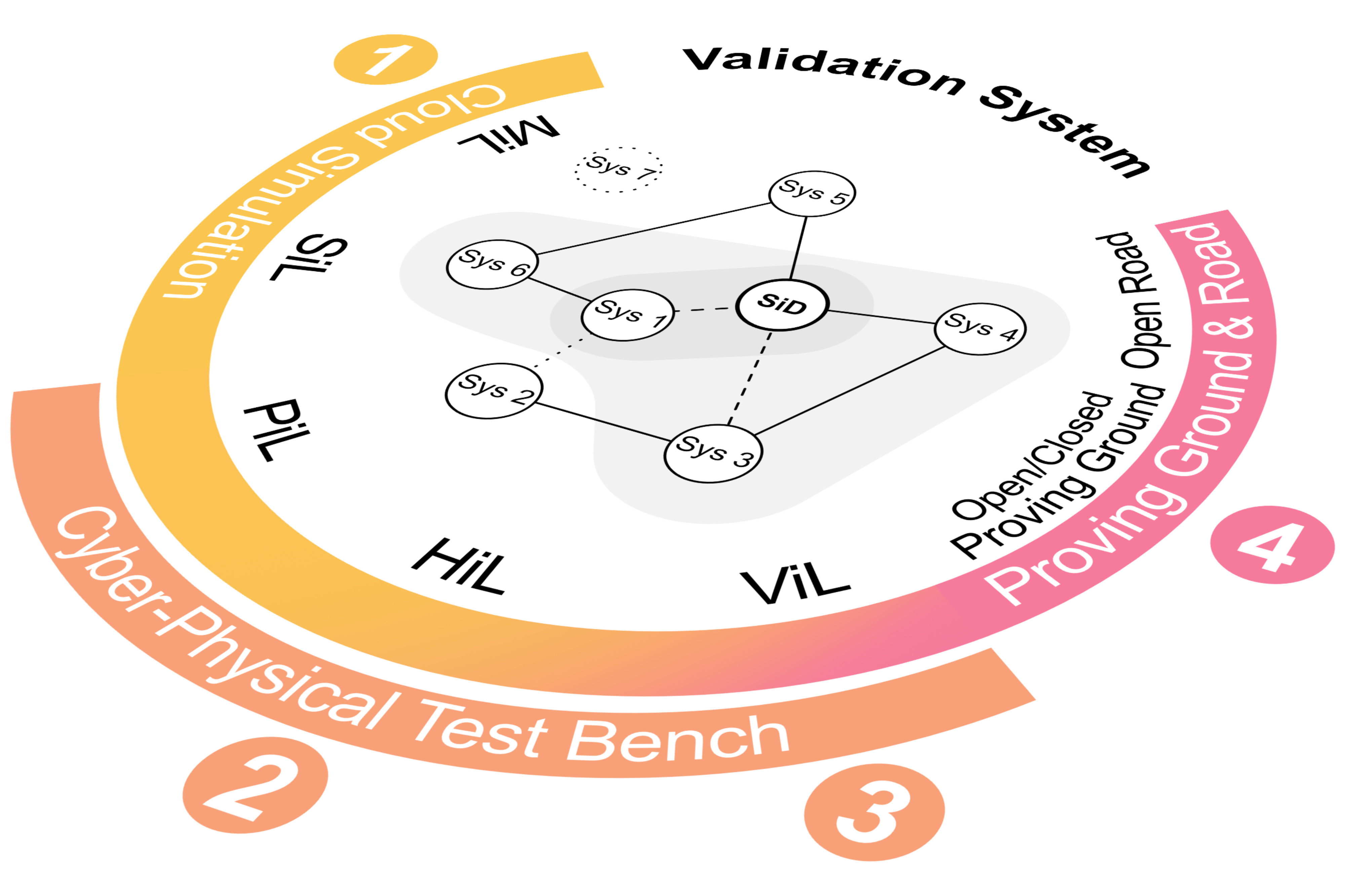
Kontextsensitive Auswahl von ValidierungsumgebungenIn der Entwicklung und Validierung von cyber-physischen Systemen, wie bspw. automatisierten Fahrzeugen kommen eine Vielzahl von verschiedenen Validierungsumgebungen zum Einsatz. Die konkrete Auswahl der Umgebung ist dabei häufig gewohnheits- oder erfahrungsgetrieben. In diesem Forschungsgebiet beschäftigen wir uns mit der Frage, wie spezifische Umgebungen einzelnen Testfällen oder Szenarien zugewiesen werden können. Eine wesentliche Entscheidungsgrundlage ist dabei die notwendige und erreichbare Credibility. |
 |
|
 |
Modulare und vernetzte ValidierungsumgebungenDie Bereitstellung einer adäquaten Validierungsumgebung hängt maßgeblich von den vorhandenen Validierungsressourcen (Prüfstände, Infrastruktur, Methoden, …) eines Vorhabens ab. Vor allem in der Validierung automatisierter Fahrfunktionen stellen diese Ressourcen und dessen effizienter Einsatz den Flaschenhals in der Entwicklung dar. Durch die Erforschung der Modularisierung und Verbindung von bestehenden Validierungsumgebungen mit Schwerpunkt auf die cyber-physische Welt, insbesondere Vehicle-in-the-Loop, Hardware-in-the-Loop und Driver-in-the-Loop, versuchen wir den zurückhaltenden Einfluss in der Entwicklung zu verringern. |
|
Validierung im Metaverse mittels Serious GamingMit unserem Forschungsprojekt "Automated Vehicle Validation" – kurz AVVA – wollen wir einen Ansatz für eine neuartige Quelle für kritische und relevante Szenarien bieten. Dazu spielen mehrere Personen gleichzeitig in einer virtuellen Umgebung und werden mit Herausforderungen und Minispielen konfrontiert, welche sie spielerisch und mithilfe der eigenen Kreativität lösen müssen. Das Spielgeschehen wird kontinuierlich überwacht und interessante Szenarien werden aufgezeichnet. |
 |
|
 |
LLM Scenario GenerationKritische Szenarien sind ein wesentliches Element für die durchgängige Absicherung automatisierter Fahrzeuge. Kritische Szenarien werden derzeit unter anderem aus Flottendaten und Unfallstatistiken abgeleitet. In einem neuen Ansatz setzen wir generative KI und insbesondere Large Language Models (LLMs) zur Generierung kritischer Szenarien ein. |
|
Leistungsangebot
- Aufbau von kundenspezifischen Serious Gaming Umgebungen zur Identifizierung von relevanten Szenarien oder Konflikt-Situationen
- Entwicklung kundenspezifischer Validierungsumgebungen für die Erprobung von ADAS/ADS wie bspw. Lenkungs- und Bremsenprüfstände
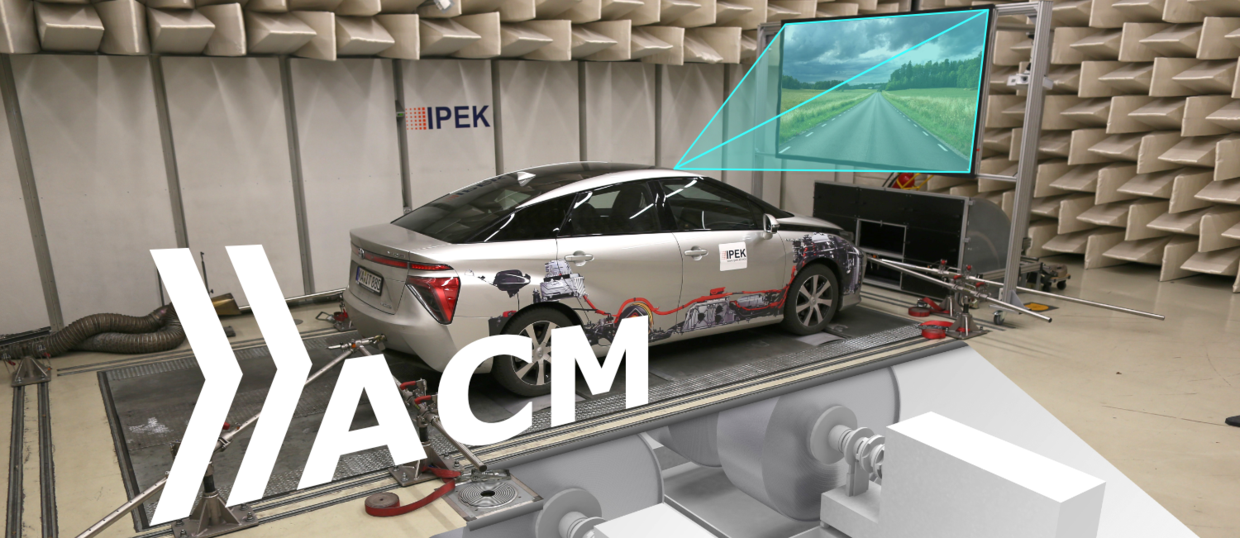
- Durchführung von Vehicle-in-the-Loop (ViL) Messungen mit Sensorstimulation
- Credibilitybewertung von Validierungsumgebungen
Ausstattung
- Rollenprüfstand: 2-Achs-getriebener Rollenprüfstand mit Vehicle-in-the-Loop-Technologie im Halbfreifeldraum
- Fahrroboter (Stähle SAP 2000)
- Alle gängigen Softwarelösungen zur Fahrzeug- und Sensorsimulation
- IPEK-Fahrsimulator mit Force-Feedback-Pedal
- Diverse Versuchsfahrzeuge (konventionell, hybridisch, elektrisch)




 108
108
Ausgewählte Publikationen
Fischer, D.; Weber, Y.; Freyer, J.; Bause, K.; Düser, T.
2024. 2024 IEEE International Automated Vehicle Validation Conference (IAVVC), 22nd-23rd October 2024, Pittsburgh, PA, 1–6, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/IAVVC63304.2024.10786480
Jegarian, M.; Freyer, J.; Hamarneh, Q.; Klöck, L.; Schyr, A.; Schwammberger, M.; Düser, T.
2024. 2024 IEEE International Automated Vehicle Validation Conference (IAVVC), Pittsburgh, PA, USA, 22-23 October 2024, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/IAVVC63304.2024.10786398
Urbano, F. P.; Grycz, P.; Freyer, J.; Bause, K.; Bischofberger, A.; Düser, T.; Albers, A.
2024. International Dependency and Structure Modeling Conference (DSM 2024)
Mueller, J.; Liu, X.; Maier, J.; Frey, G.
2024. 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), Bari, Italy, 28 August 2024 - 01 September 2024, 1889–1896, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/CASE59546.2024.10711740
Düser, T.; Fischer, D.; Freyer, J.
2023. 2023 IEEE International Automated Vehicle Validation Conference (IAVVC), Austin, TX, 16th-18th October 2023, 1–6, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/IAVVC57316.2023.10328076
Benedikt, M.; Böde, E.; Bossert, A.; Braband, J.; Brade, T.; Braun, N.; Braun, T.; Burton, S.; Dallmann, T.; Damm, W.; Düser, T.; Elster, L.; Fingscheidt, T.; Fistler, M.; Franek, M.; Fränzle, M.; Freyer, J.; Galbas, R.; Gansch, R.; Geyer, D.; Haas, L.; Haider, A.; Heidl, P.; Hein, M.; Heyl, A.; Hiller, J.; Hungar, H.; Hutter, D.; Jung, R.; Klein, C.; Krüger, J.; Kuhn, T.; Langner, J.; Maurer, M.; Mayr, K.; Meyer-Vitali, A.; Möhlmann, E.; Molin, A.; Möller, B.; Niehaus, J.; Nolte, B.; Nolte, M.; Otten, S.; Peleska, J.; Peters, S.; Poguntke, T.; Poprawa, F.; Reich, J.; Rosenberger, P.; Salem, N. F.; Schick, B.; Schneider, D.; Schneider, S.-A.; Schyr, C.; Thomas, C.; Trapp, M.; Wagner, F.; Wagener, N.; Woopen, T.; Zeh, T.
2023
Düser, T.; Fischer, M.; Schwarz, S. E.; Bastian, A.; Freyer, J.; Vlajic, K.; Eisenmann, M.; Matthiesen, S.; Albers, A.
2023. Metaverse – METAVERSE 2023 – 19th International Conference, Held as Part of the Services Conference Federation, SCF 2023, Honolulu, HI, USA, September 23–26, 2023, Proceedings. Ed.: S. He, J. Lai, L.-J. Zhang, 39 – 52, Springer Nature Switzerland. doi:10.1007/978-3-031-44754-9_4
Freyer, J.; Düser, T.
2023. 9th International Symposium on Transportation Data & Modelling (ISTDM2023), Ispra, June 19-22, 2023